

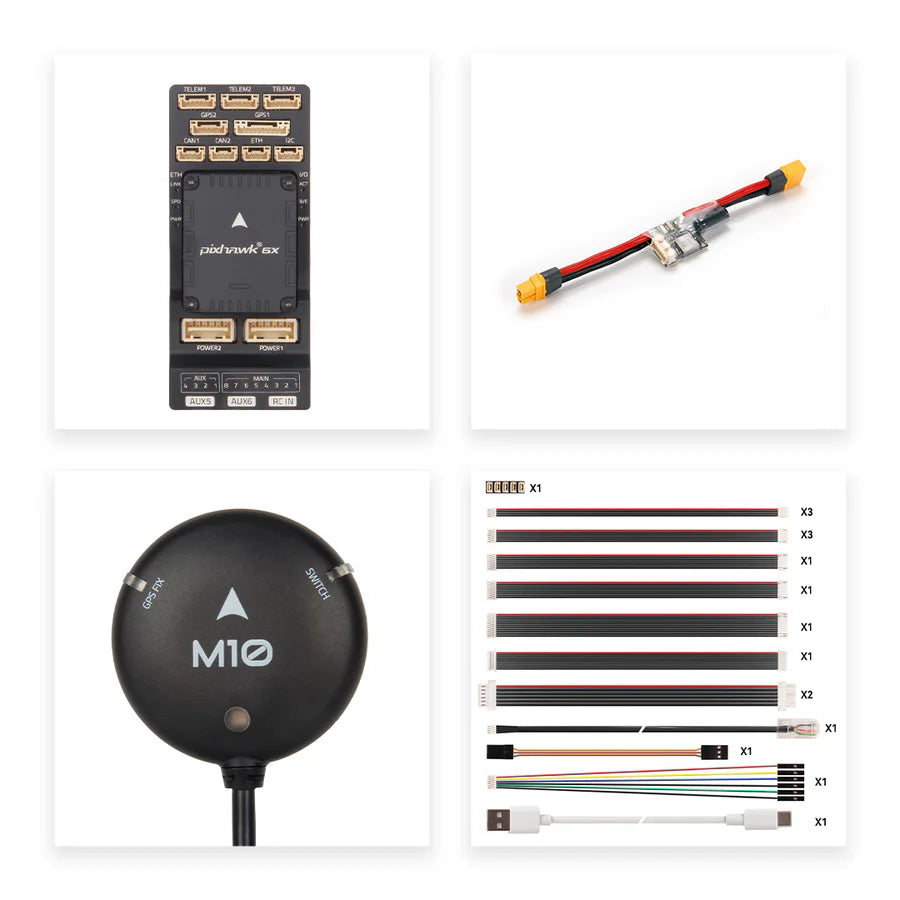
NEW Holybro Pixhawk 6X UAV Flight Controller ICM-45686
Reliable shipping
Flexible returns
Pixhawk 6X: Redefining Reliability in Autonomous Flight
A new generation of autonomous systems is here—and while performance has grown, the demand for absolute reliability has skyrocketed. For industrial and commercial UAVs, a single point of failure isn't just an inconvenience; it's a mission-critical risk.
How do you build a system that you can fundamentally trust? And what does this mean for the future of complex drone operations? The Pixhawk 6X is engineered to answer these questions, setting a new benchmark for dependability and performance in the Pixhawk® standard.
Why the Pixhawk 6X Is a Decisive Leap Forward
1. Extreme Reliability Through Triple-Redundancy
What might this mean for flight stability? It means moving beyond single-sensor dependency. The Pixhawk 6X integrates three high-precision IMU sensors and two barometer sensors, each in a completely isolated domain with separate buses and separate power control. This triple-redundancy architecture, featuring BalancedGyro™ technology, ensures that sensor data is continuously cross-checked and validated, effectively eliminating single points of failure and providing a layer of trust previously unattainable in this class.
2. An All-New Paradigm in Vibration Isolation
One of the core challenges in flight control is isolating the IMU from high-frequency vibrations. The Pixhawk 6X abandons traditional foam for a custom-formulated, durable isolation material. Backed by extensive R&D, this design shifts the resonance frequency into a higher spectrum, providing superior damping characteristics. The bottom line: it delivers cleaner, higher-fidelity sensor data, which translates directly to more precise and stable flight, especially in demanding industrial environments.
3. Performance and Modularity for Advanced Integration
At its heart is a high-performance STM32H753 processor, providing the computational power needed for complex algorithms and payloads. But performance is only part of the story. The Pixhawk 6X features a modular design, separating the IMU, FMU, and Base system. This, combined with an Ethernet interface for high-speed mission computer integration, makes it an ideal platform for researchers and commercial developers building the next generation of specialized UAVs.
Technical Specifications at a Glance
For those who want to explore the data, here is a detailed breakdown of the components that power the Pixhawk 6X.
| Category | Specification |
|---|---|
| Processors & Sensors |
FMU Processor: STM32H753 (32 Bit Arm® Cortex®-M7, 480MHz, 2MB flash, 1MB RAM) IO Processor: STM32F103 (32 Bit Arm® Cortex®-M3, 72MHz, 64KB SRAM) On-board Sensors (Current Rev 8): • Accel/Gyro: 3x ICM-45686 • Barometer: ICP20100 & BMP388 • Magnetometer: BMM150 On-board Sensors (Previous Rev 3/4): • Accel/Gyro: BMI088, ICM-20649, ICM-42688-P, ICM-42670-P • Barometer: 2x BMP388 Security: NXP EdgeLock SE050 Secure Element |
| Electrical Data |
Voltage Ratings: Max 6V input, 4.75-5.25V USB, 0-36V Servo Rail Current Ratings: 1.5A limit for Telem1/GPS2, 1.5A limit for all other ports PWM Signal Voltage: 3.3V (Hardware switchable to 5V) Operating Temperature: -25°C to 85°C |
| Mechanical Data |
Dimensions (Module): 38.8 x 31.8 x 16.8mm Dimensions (Standard Baseboard): 52.4 x 102 x 16.7mm Dimensions (Mini Baseboard): 43.4 x 72.8 x 14.2 mm Weight (Module): 31.3g Weight (Standard Baseboard): 72.5g Weight (Mini Baseboard): 26.5g |
Important Firmware and Usage Notes
To ensure optimal performance, please note the following compatibility requirements. The behavior will likely evolve as firmware support matures, but these are the current stable release recommendations.
- The current Rev 8 version is officially supported in PX4 v1.14.3 or later.
- For Ardupilot users, support is available in the Ardupilot 4.5.0 stable release or later.
- The unit ships with PX4 firmware by default, but can be easily flashed with Ardupilot via Mission Planner or QGroundControl.
As integration becomes more sophisticated, access to comprehensive documentation is more critical than ever. For complete setup guides, wiring diagrams, and technical details, please visit the official Holybro documentation.